Меня вполне устраивает основной принцип работы плагина пылесоса в приложении Mi Home, то есть выбор от одной до нескольких комнат и запуск пылесоса на "Уборку участка". При этом мощность всасывания и силу полива на тряпку я когда-то выставил в определенные значения и больше их не менял.
А поскольку мой "умный дом" уже больше года управляется HA, я решил соорудить что-то похожее в этой системе, чтобы пользоваться только одним приложением.
Многим известный компонент xiaomi_vacuum (https://github.com/Concentricc/xiaomi_vacuum) больше не поддерживается автором, поэтому я решил использовать альтернативную интеграцию Xiaomi Miot For HomeAssistant. Но сначала нам нужно добыть токен пылесоса.
Токен
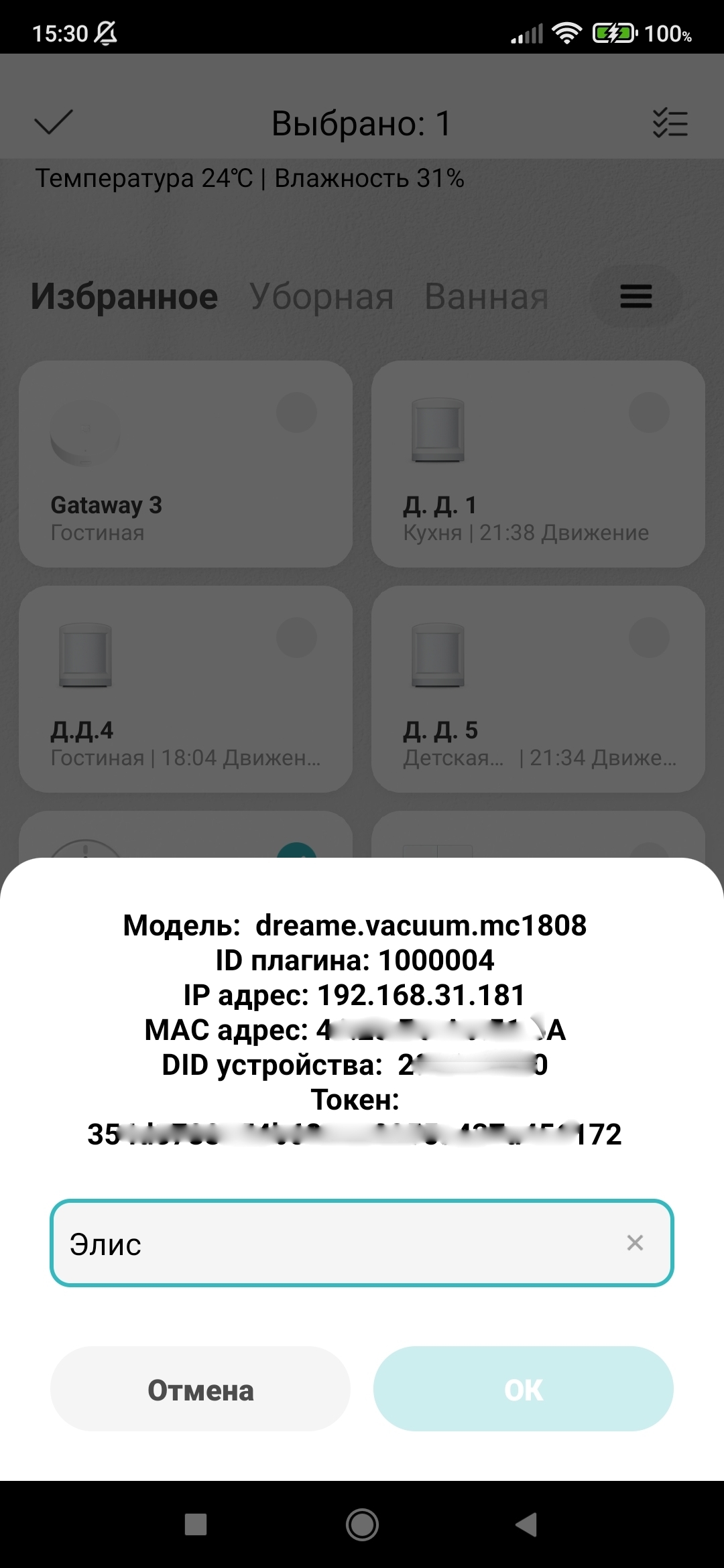
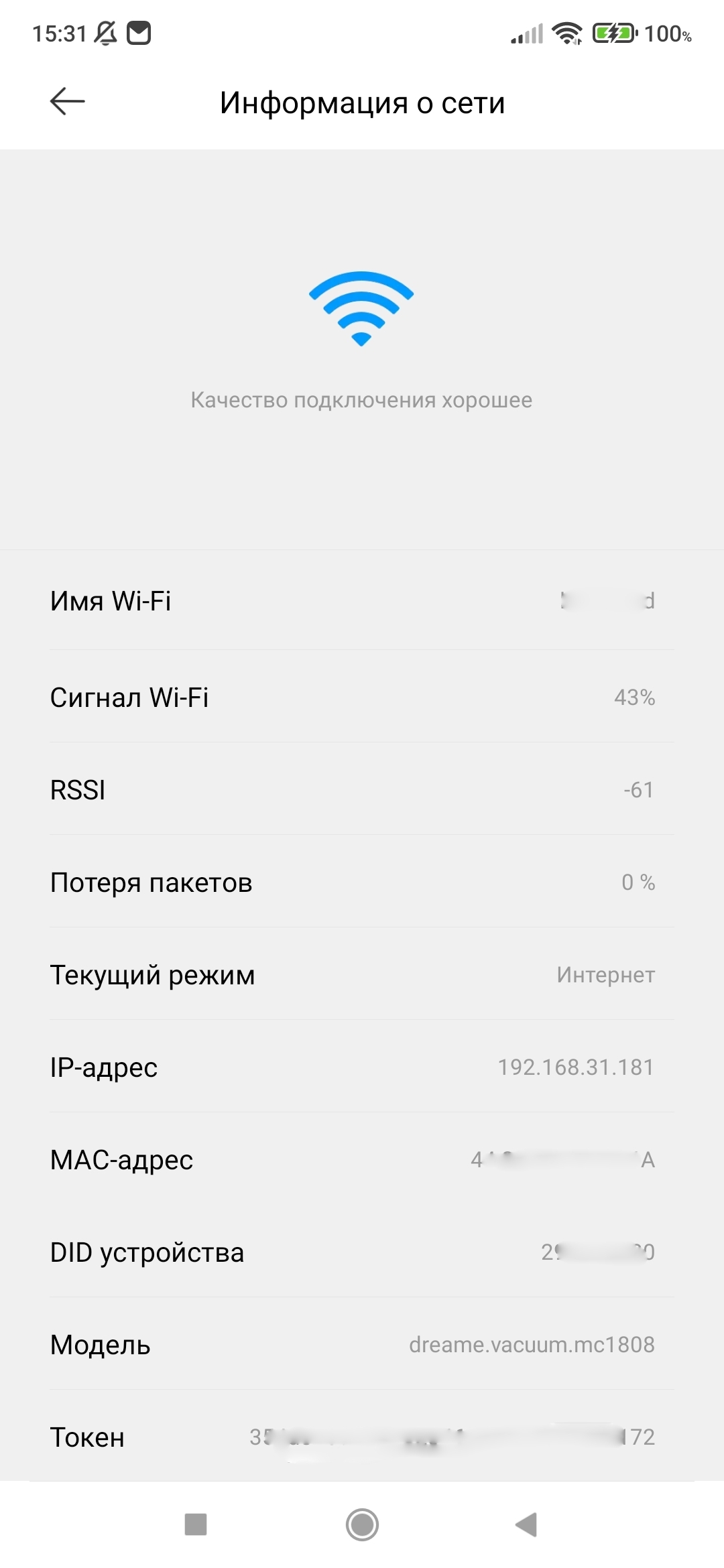
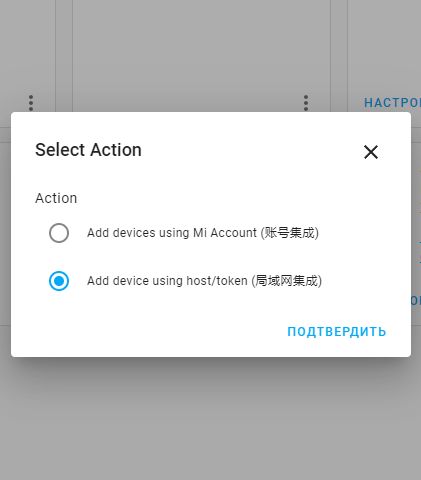
Добавить устройство в интеграцию можно либо с помощью ввода логина и пароля от Mi аккаунта (т.е. через облако), либо локально (что предпочтительнее) через ввод токена устройства. Чтобы достать токен пылесоса, устанавливаем мод. приложение Mi Home от VEVS .https://www.vevs.me/. После ввода логина и пароля от Mi аккаунта, на странице, где расположены все устройства, нажимаем и удерживаем плитку с пылесосом, пока внизу экрана не появятся ярлыки действий.

Xiaomi Miot
GitHub - al-one/hass-xiaomi-miot: Automatic integrate all Xiaomi devices to HomeAssistant via miot-spec, support Wi-Fi, BLE, ZigBee devices.Automatic integrate all Xiaomi devices to HomeAssistant via miot-spec, support Wi-Fi, BLE, ZigBee devices. - GitHub - al-one/hass-xiaomi-miot: Automatic integrate all Xiaomi devices to HomeAssistant via miot-spec, support Wi-Fi, BLE, ZigBee devices.https://github.com/al-one/hass-xiaomi-miotПосле установки компонента Xiaomi Miot одним из двух предлагаемых на github способом, заходим в "Настройки" - "Интеграции" и кликаем на кнопку "Добавить интеграцию". Находим в списке "Xiaomi Miot Auto" .


Принцип работы
У пылесоса есть два варианта уборки: "Зональная уборка" и "Уборка участка". Ниже приведены оба формата команды уборки. Зональная уборка:
- service: xiaomi_miot.call_action
data:
entity_id: vacuum.alice_vacuum_mop
siid: 18
aiid: 1
params:
- piid: 1
value: 19
- piid: 21
value: '-5975,-588,-5475,-88'
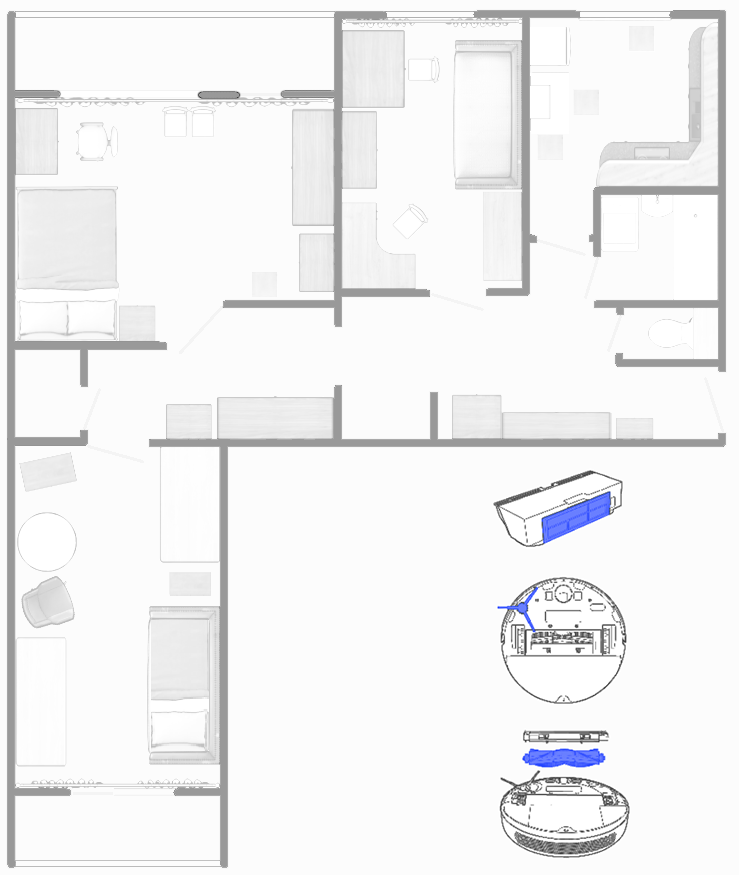
force_params: trueГде во второй строке "value" прописаны координаты прямоугольной зоны уборки. Координаты пишутся в формате: X,Y вершина одного угла прямоугольника и X,Y вершина угла по диагонали. Отсчет координат (в мм) начинается в точке, где пылесос останавливается на секунду после выезда с докстанции. Направление оси X идет как раз к этой самой станции, а направление оси Y при этом идет влево (вверх на рисунке). См. рисунок.

Уборка участка:
- service: xiaomi_miot.call_action
data:
entity_id: vacuum.alice_vacuum_mop
siid: 18
aiid: 1
params:
- piid: 1
value: 18
- piid: 21
value: '{"selects":[[5,1,1,3,1]]}'
force_params: trueЗдесь в квадратных скобках прописаны: 5-номер комнаты; 1-либо доп. знакоместо для нумерации комнат, если не хватает первого (больше десяти), либо для количества повторов уборки, для другой модели пылесоса (наш вроде не поддерживает); 1-мощность всасывания (0-3); 3-сила полива на тряпку. Последняя цифра мною не изучена.
Как я писал вначале, меня интересуют только номера комнат, то есть только первая цифра.
Формат строки может быть и таким:
value: '{"selects":[[5,1,1,3,1],[1,1,1,3,1],[3,1,1,3,1]]}'В этом случае пылесос поедет убирать комнаты номер 5, 1 и 3, но последовательность уборки он определяет сам.
Таким образом в эту строку можно "запихнуть" от одной до всех комнат, что мне и нужно.
Реализация
Чтобы реализовать имитацию работы плагина пылесоса в Mi Home, создаем для каждой комнаты input boolean, и объединяем их в группу:
input_boolean:
bedroom_vacuum:
name: "Спальня уборка"
halfhallway_vacuum:
name: "Полукоридор уборка"
hallway_vacuum:
name: "Коридор уборка"
livingroom_vacuum:
name: "Гостиная уборка"
childrensroom_vacuum:
name: "Детская уборка"
kitchen_vacuum:
name: "Кухня уборка"
group:
all_rooms_for_vac_clean:
name: All rooms for vacuum clean
entities:
- input_boolean.halfhallway_vacuum
- input_boolean.hallway_vacuum
- input_boolean.bedroom_vacuum
- input_boolean.livingroom_vacuum
- input_boolean.childrensroom_vacuum
- input_boolean.kitchen_vacuumЗатем придумываем такой сенсор:
sensor:
select_rooms_for_clean:
value_template: >
{% set dfg = expand('group.all_rooms_for_vac_clean') | selectattr('state', 'eq', 'on')
| map(attribute='entity_id') | list | join(',')
| replace('input_boolean.halfhallway_vacuum','[2,1,1,3,1]')
| replace('input_boolean.hallway_vacuum','[4,1,1,3,1]')
| replace('input_boolean.bedroom_vacuum','[1,1,1,3,1]')
| replace('input_boolean.livingroom_vacuum','[3,1,1,3,1]')
| replace('input_boolean.childrensroom_vacuum','[5,1,1,3,1]')
| replace('input_boolean.kitchen_vacuum','[6,1,1,3,1]') %}
{"selects":[{{dfg}}]}
friendly_name: "Выбранные комнаты для пылесоса"
icon_template: mdi:vacuumОн просматривает нашу группу на предмет включенных input boolean, затем забирает их названия, записывает их в строку, разделяя запятой, и, наконец, заменяет каждое имя в списке соотвестовующим набором цифр в квадратных скобках. Т.е. если у нас кухня - это комната 1, то активный input boolean "Кухня" будет заменен строкой [1,1,1,3,1] и так далее.
На выходе к набору цифр в скобках добавляются недостающие знаки для формирования полноценной строки. После перезагрузки HA появляется сенсор, формирующий нужную нам строку:
sensor.select_rooms_for_clean
Пишем скрипт, в который закидываем значение нашего датчика.
clean_select_rooms:
alias: Убрать выбранные комнаты
sequence:
- service: xiaomi_miot.call_action
data_template:
entity_id: vacuum.alice_vacuum_mop
siid: 18
aiid: 1
params:
- piid: 1
value: 18
- "{{ {'piid':21, 'value': states('sensor.select_rooms_for_clean') } }}"В принципе, после этого достаточно вывести наши булеаны в интерфейс и всё будет работать.
Дополнитльно я написал автоматизацию, которая сбрасывает булеаны после окончания уборки:
automation:
- alias: 'reset_select_rooms'
id: Reset select rooms
trigger:
- platform: state
entity_id: vacuum.alice_vacuum_mop
to: 'docked'
condition: []
action:
- service: input_boolean.turn_off
entity_id:
- input_boolean.halfhallway_vacuum
- input_boolean.hallway_vacuum
- input_boolean.bedroom_vacuum
- input_boolean.livingroom_vacuum
- input_boolean.childrensroom_vacuum
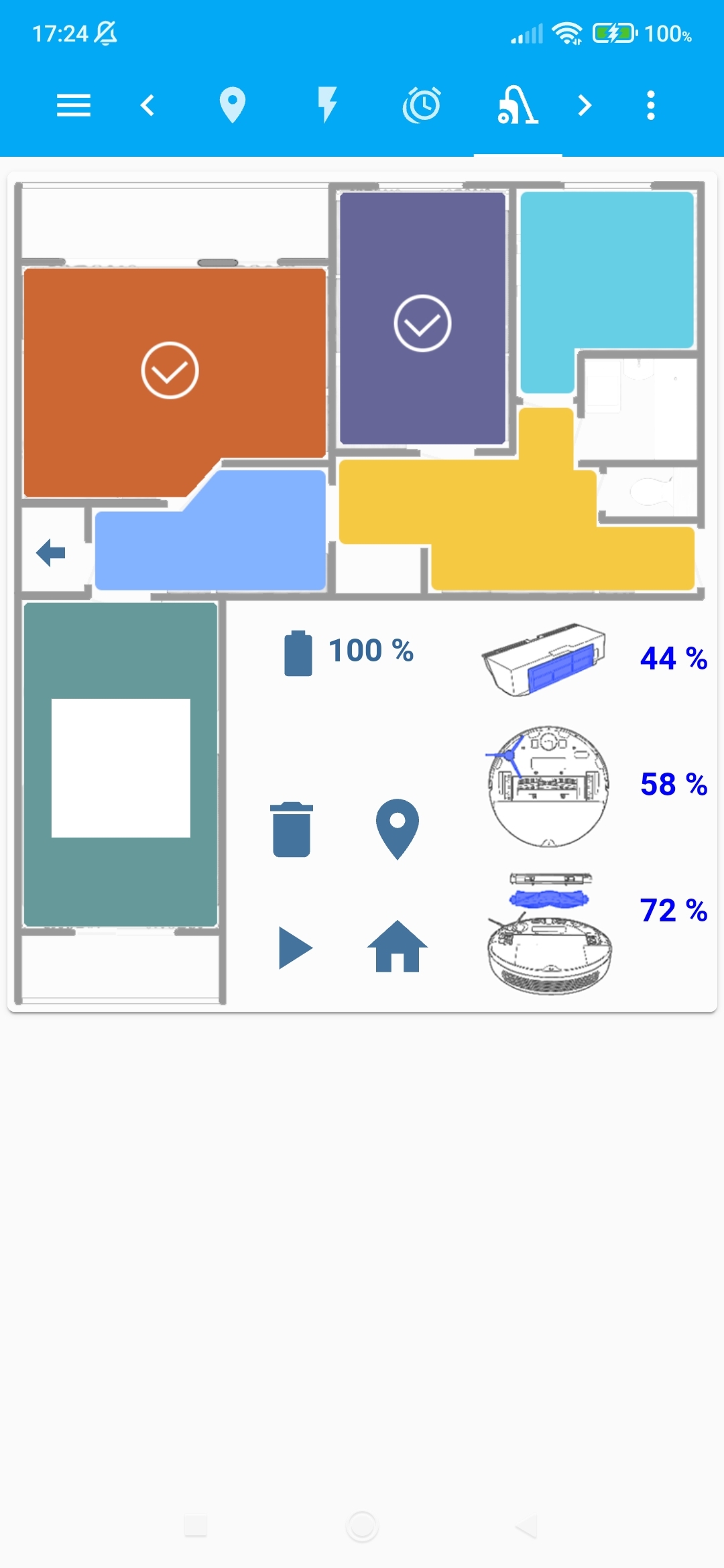
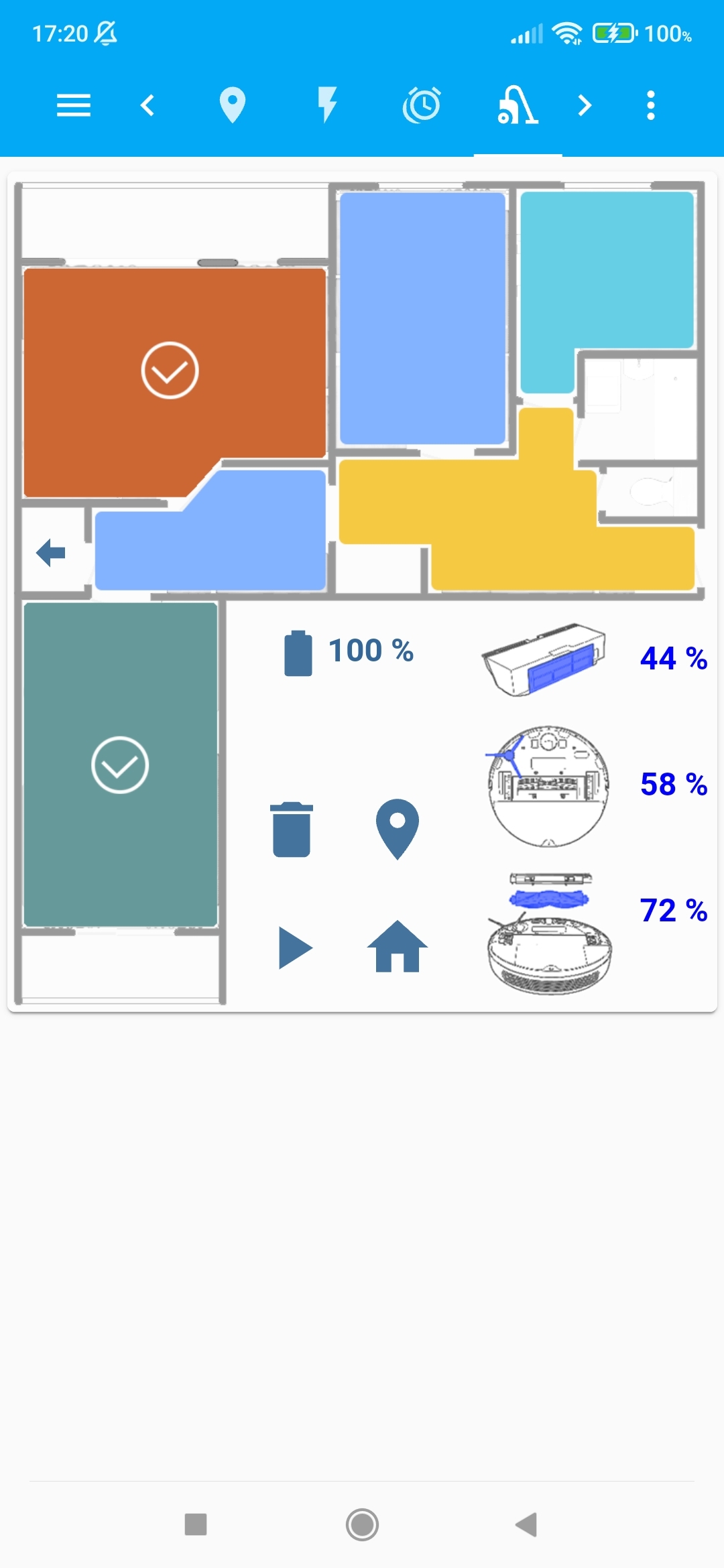
- input_boolean.kitchen_vacuumНу и наконец, делюсь идеей оформления карточки пылесоса. Поскольку моя цель была симитировать базовую функцию плагина Mi Home, я решил сделать нечто похожее. По виду - очень на любителя. При создании карточки, использовался один из множества мануалов по оформлению интерактивного 3д плана помещения для HA, поэтому нет смысла подробно его здесь описывать. В двух словах:


Дальше - код в lovelace.
Приведу пример кода для фона и одной комнаты:
- title: Vacuum
# path: floorplan
# panel: true
icon: mdi:vacuum
cards:
- type: picture-elements
image: /local/plan_for_vacuum_3.png ###### План квартиры #######
elements:
- type: image ################ Спальня #################
entity: input_boolean.bedroom_vacuum
tap_action: none
hold_action: none
state_image:
"on": /local/bedroom_check.png
"off": /local/bedroom.png
style:
top: 50%
left: 50%
width: 100%
################### Кнопки помещений ###################
- type: image ################ Кнопка спальни #################
entity: input_boolean.bedroom_vacuum
tap_action:
action: toggle
state_image:
"on": /local/white_square.png
"off": /local/transparent_square.png
style:
top: 71%
left: 16%Остальные иконки и показания датчиков ничего особенного из себя не представляют. Ниже приведены примеры оформления показания износа фильтра и кнопки пуск/стоп, в зависимости от состояния пылесоса. Если он на зарядке - запустится уборка выбранных участков, если стоит не на зарядке - снимется с паузы. Если ездит - встанет на паузу.
################ Оставшиеся проценты фильтра #################
- entity: sensor.dreame_mc1808_516a_filter_life_level
style:
font-family: Trebuchet MS
font-size: 120%
font-weight: bold
left: 87%
opacity: 1.0
top: 58%
transform: 'translate(0%,-50%)'
color: blue
type: state-label
- type: conditional
conditions:
- entity: vacuum.alice_vacuum_mop
state_not: "cleaning"
- entity: vacuum.alice_vacuum_mop
state_not: "docked"
elements:
- type: state-icon
tap_action:
action: call-service
service: vacuum.start
service_data:
entity_id: vacuum.alice_vacuum_mop
confirmation: true
entity: vacuum.alice_vacuum_mop
icon: mdi:play
style:
top: 92%
left: 40%
--mdc-icon-size: 40px
- type: conditional
conditions:
- entity: vacuum.alice_vacuum_mop
state: "docked"
elements:
- type: state-icon
tap_action:
action: call-service
service: script.clean_select_rooms
confirmation: true
entity: vacuum.alice_vacuum_mop
icon: mdi:play
style:
top: 92%
left: 40%
--mdc-icon-size: 40px
- type: conditional
conditions:
- entity: vacuum.alice_vacuum_mop
state: "cleaning"
elements:
- type: state-icon
tap_action:
action: call-service
service: vacuum.pause
service_data:
entity_id: vacuum.alice_vacuum_mop
entity: vacuum.alice_vacuum_mop
icon: mdi:pause
style:
top: 92%
left: 40%
--mdc-icon-size: 40pxНа этом заканчиваю свою первую статью. Прошу сильно не ругать.
В приложении Mi Home, когда карта нарисована и комнаты подписаны, то им всем присвоен номер (первая цифра в квадратных скобках при "уборке участка" [1,1,1,3,1]).
Я в Хоум Ассистант поочередно запустил службу, меняя первую цифру в квадратных скобках.
Записал номера соответствующих комнат, куда он при этом поехал.
- service: xiaomi_miot.call_action
data:
entity_id: vacuum.alice_vacuum_mop
siid: 18
aiid: 1
params:
- piid: 1
value: 18
- piid: 21
value: '{"selects":[[1,1,1,3,1]]}'
force_params: true
...
value: '{"selects":[[2,1,1,3,1]]}'
...
value: '{"selects":[[3,1,1,3,1]]}'
...
value: '{"selects":[[4,1,1,3,1]]}'
…
и так далее.
Можно другим способом, подсмотреть код команды в файле в телефоне, но я этим не пользовался.
Собственно, способ описан Никитой Романенко на этом же сайте:
https://sprut.ai/article/priruchi-home-assistant-pylesos-upravlenie-interaktivnaya-karta-uvedomleniya
Этим способом можно увидеть и координаты "зональной уборки", как у него в примере, и номер комнаты в строке с "select...", если дашь команду "уборка участка" (тыкнуть по комнате и нажать "старт").
params:
- piid: 1
value: 18
- piid: 21
value: "{{states('sensor.select_rooms_for_clean')}}"
Вписать:
params:
- piid: 1
value: 18
- "{{ {'piid':21, 'value': states('sensor.select_rooms_for_clean') } }}"
Это сработало. Может у вас что-то похОжее?
params: >-
[
{
"piid": 1,
"value": 18
},
{
"piid": 21,
"value": "{\"selects\":[{{rooms}}]}"
}
]
service: xiaomi_miot.set_miot_property
data:
entity_id: vacuum.alice_vacuum_mop
siid: 18
piid: 6
value: 1 # (0-3) - мощность
____________________________________________
service: xiaomi_miot.set_miot_property
data:
entity_id: vacuum.alice_vacuum_mop
siid: 18
piid: 20
value: 3 # (1-3) - полив воды
После добавления этого:
sensor:
select_rooms_for_clean:
value_template: >
{% set dfg = expand('group.all_rooms_for_vac_clean') | selectattr('state', 'eq', 'on')
| map(attribute='entity_id') | list | join(',')
| replace('input_boolean.halfhallway_vacuum','[2,1,1,3,1]')
| replace('input_boolean.hallway_vacuum','[4,1,1,3,1]')
| replace('input_boolean.bedroom_vacuum','[1,1,1,3,1]')
| replace('input_boolean.livingroom_vacuum','[3,1,1,3,1]')
| replace('input_boolean.childrensroom_vacuum','[5,1,1,3,1]')
| replace('input_boolean.kitchen_vacuum','[6,1,1,3,1]') %}
{"selects":[{{dfg}}]}
friendly_name: "Выбранные комнаты для пылесоса"
icon_template: mdi:vacuum
HA ругается на конфиг:
Ошибка в конфигурации
Invalid config for [sensor]: required key not provided @ data['platform']. Got None. (See ?, line ?).
Что не так?
Мой косяк. Выложил неполный код. Здесь скриншот оригинала.
А вот эти параметры, что значат:
siid: 18
aiid: 1
params:
- piid: 1
value: 18
?
У меня пока пылесос ни как не реагирует.....
Если у вас пылесос не "dreame.vacuum.mc1808", параметры будут другими.
Где эти параметры брать?
Ссылку на список моделей привожу. Там же ссылки на параметры конкретной модели можно найти.
https://home.miot-spec.com/s/vacuum
За основу взят ваш скрипт.
Скрипт clean_select_rooms не получает значения из сенсора select_rooms_for_clean.
Что не так?
{"id":1771,"method":"action","params":{"did":"292143855","siid":18,"aiid":1,"in":[{"piid":1,"value":18},{"piid":21,"value":"{\"selects\":[[4,1,1,1,1],[3,1,1,1,1]}"}]}}.
Главная задача - сформировать такую строку со всеми "siid","aiid","piid","value"...
Какой формат команды для вашего пылесоса, я не знаю.
В params указывал номер комнат через запятую и работало.
Поэтому, думаю, что если через states('sensor.select_rooms_for_clean') передать в скрипт, то должно работать.
Но в скрипт состояние states('sensor.select_rooms_for_clean') не передаётся =(
Если не знаете, где:
Настройки -> Автоматизации и сцены -> Скрипты -> ищем свои скрипты -> напротив три точки -> Трассировка. И сравнить выходные данные при выполнении скриптов. Любые различия (кавычки и пр.) имеют значения.
https://www.home-assistant.io/docs/configuration/packages/
К сожалению, документация только на английском.
Не помню, пробовал или нет, в строке:
value: '{"selects":[[5,1,1,3,1],[1,1,1,3,1],[3,1,1,3,1]]}'
Поставить подряд два раза одну комнату. Может "сожрет"
value: '{"selects":[[5,1,1,3,1],[5,1,1,3,1]]}'
Позже попробую
P.S.
Проверил. Не сработало. Убрал один раз.
После уборки мне удобно чистить пылесос в определенном месте квартиры (недалеко от мусорного ведра). При этом не хотелось таскать его с базы в это место. И придумал что-то вроде "костыля", чтобы он приезжал в одну точку для уборки. Для этого я определил участок 50 на 50см (меньшую зону не задать) в удобном для меня месте, и сделал сценарий, в котором, по нажатию кнопки, он едет на зонированную уборку, при этом в HA включается таймер на 41 секунду (экспериментально вычислено). После окончания отсчета следует команда "пауза".
В 99% он приезжает в одну точку, плюс/минус 20см. Иногда задевает шкаф в коридоре и останавливается, не доехав полметра.
После очистки жму "Домой" на пылике или даю команду Алисе, чтобы ехал на зарядку.
Чтобы его заранее "растормошить", я сделал автоматизацию, в которой, при выборе комнат уже идет посыл пылику (информация) о мощности всасывания и полива. И тогда, в момент нажатия кнопки "старт" он уже, что называется, на связи.
я видел у других фото карточки, кроме как у вас расходных материалов, еще было типо сколько с последней уборке время прошло, зона последний уборки в м2 и тд.
эта инфа в родном приложение сразу сверху есть. можно ее как то в ХА?)
ДА и еще у меня мощность на китайском, немного не пофеншую по красоте, можно это как то исправить?
желательно с примером как это сделать)